
Spannen und Lösen des Werkstücks im manuellen Schraubstock
Der Game Changer für die Automation von CNC Maschinen
Das Problem
Mit der Roboterbestellung und der Beauftragung des Integrators allein kann CNC Automation nicht funktionieren. Denn: Wer oder was spannt in einem voll automatisierten Fertigungsprozess den Schraubstock? Und wer oder was löst ihn wieder?
Die Lösung
Das übernimmt der CLAMPBOOSTER. Er erweitert den Roboter um einen Antrieb für den Schraubstock. Dadurch kann der Roboter hochpräzise Spannvorgänge mit manuellen Schraubstöcken schnell und sicher ausführen.
Der bestehende Fertigungsprozess bleibt unangetastet und kann wie gewohnt weitergeführt werden. Dank einer mit dem CLAMPBOOSTER nun vollständig automatisierten CNC Produktion ohne manuelle Komponenten rund um die Uhr.
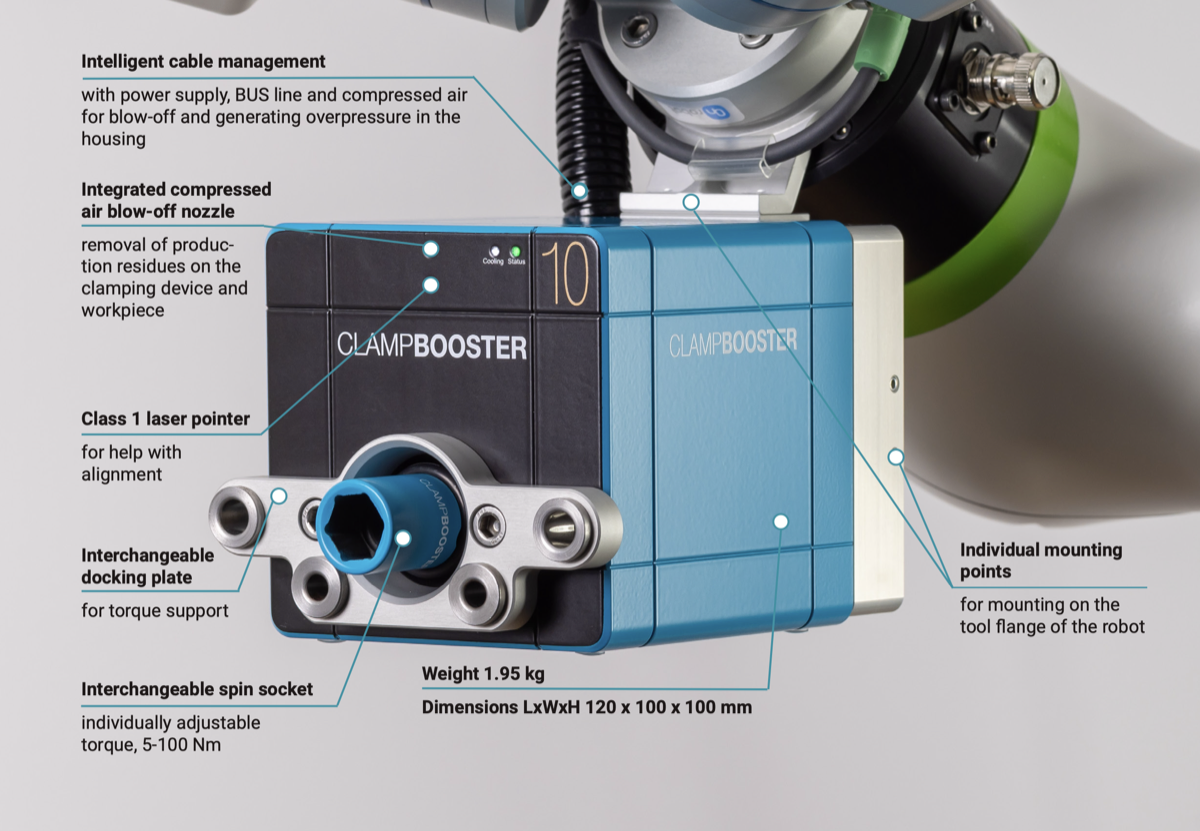
Modell CB-10
Technische Daten zum CLAMPBOOSTER
Flexibel und individuell gesteuertes Drehmoment: 5 - 100Nm
Sehr kurze Schließ- und Öffnungszeit: ca. 5 Sekunden
Antrieb: Spin Socket
Abblasdüse: integriert
Fernwartung: integriert
Maße "Drive": LxBxH 120mm x 100mm x 100mm
Anschluss: 100 - 240V AC, 6-2,5 A, Druckluft 5 - 6,5 bar
Gesteuerte Öffnungsweite:
Betriebsart: elektrisch
Docking Plate: schnell austauschbar
Roboterschnittstellen: analog/digital oder Profinet
Softwareupdates: online
Mechanik: wartungsfrei
Gewicht: 1,95 kg
Ein System. Viele Integrationsmöglichkeiten.
Schnittstellen für jede Automatisierungsstufe.
Der CLAMPBOOSTER wurde konsequent darauf ausgelegt, die Kommunikation mit dem Roboter auf ein Minimum zu reduzieren. Dadurch entsteht ein besonders robustes, flexibles und einfach integrierbares System, das sich an unterschiedliche Automatisierungsgrade anpassen lässt – von autarken Lösungen bis hin zur tiefen Einbindung in bestehende Steuerungsarchitekturen. Je nach Anwendung und Systemumgebung stehen drei Integrationsstufen zur Verfügung, die unterschiedliche Anforderungen an Kommunikation und Steuerung abdecken:
1. Stand-alone-Betrieb (minimal-invasiv)
Der CLAMPBOOSTER arbeitet autark. Der Roboter übernimmt lediglich die Positionierung am Schraubstock, während alle Prozessschritte – Öffnen, Schließen, Überwachung und Freigabe – direkt im System erfolgen. Es ist keine kontinuierliche Kommunikation mit einer SPS oder dem Roboter erforderlich, wodurch sich die Integration besonders einfach und robust gestaltet.
2. Standardintegration über Industrial Ethernet und Roboterschnittstellen
Hier wird der CLAMPBOOSTER über gängige Industrieprotokolle in die Automatisierungsumgebungeingebunden. Dazu zählen PROFINET, EtherNet/IP, EtherCAT sowie Modbus TCP – je nach eingesetztemSystem.

Profinet
Ideal für Siemens-basierte Systeme, insbesondere für die S1200-Serie. Ein etablierter Standard in derdeutschen und europäischen Industrie, der eine besonders reibungslose Integration mit hoherZuverlässigkeit ermöglicht.

EtherNet/IP
Ein weltweit verbreitetes Protokoll mit starker Verbreitung in Nordamerika. Optimal geeignet für dieIntegration mit Allen-Bradley, Rockwell Automation und weiteren industriellen Steuerungssystemen.
EtherCAT
Besonders geeignet für hochdynamische Anwendungen mit sehr kurzen Zykluszeiten und präziserEchtzeitkommunikation in komplexen Maschinen- und Robotiksystemen.
Modbus TCP
Eine flexible Lösung für einfache bis mittlere Automatisierungsaufgaben und auch für stand-alone-nahe Anwendungen geeignet. Besonders interessant, wenn keine zentrale SPS im Mittelpunkt stehtoder eine einfache Integration in bestehende Systeme gewünscht ist.
3. Tiefe Systemintegration (Schaltschrank- und Steuerungseinbindung)
Für anspruchsvolle Automatisierungsumgebungen ist der CLAMPBOOSTER auch als integrierbare Einzelkomponentenlösung verfügbar. Dabei wird er direkt in bestehende Schaltschrank- und Steuerungskonzepte eingebunden und kann eng mit übergeordneten Produktions- und Leitsystemen zusammenarbeiten. Diese Variante ermöglicht die tiefste Integrationstiefe und maximale Anpassung ankundenspezifische Anlagenarchitekturen.
Manueller Schraubstock. Automatisierter Prozess.
Wenige Schritte zur automatisierten Spannlösung.
Schritt 1
Vorbereitung des Schraubstocks
Der CLAMPBOOSTER setzt während des Schraubvorgangs an zwei Passstiften am Schraubstock an, so werden Torsionskräfte eliminiert und der Roboter arbeitet ohne Belastung. Die Bohrung für diese zwei Passstifte ist die einzig notwendige Vorbereitung des Schraubstocks.
Schritt 2
Befestigung am Roboterarm
Beim Cobot wird der CLAMPBOOSTER zwischen ISO-Flansch und Greifer geschraubt. Beim Industrieroboter erfolgt die Montage direkt am Werkzeugflansch des Roboterarms.
Schritt 3
Schließen des Schraubstocks nach Beladung des Werkstücks
Nachdem der Roboter das Werkstück im Schraubstock platziert hat, führt der Roboterarm den CLAMPBOOSTER direkt zum Schraubstock. Der CLAMPBOOSTER schließt diesen entsprechend dem eingestellten Drehmoment.
Schritt 4
Öffnen des Schraubstocks nach Bearbeitung der Fräsmaschine
Nach der Bearbeitung in der Fräsmaschine öffnet der CLAMPBOOSTER den Schraubstock. Abschließend erfolgt die Entladung des Werkstücks durch den Roboter und der Produktionsprozess startet erneut (siehe Schritt 3).
Ganz einfach, dank nur eines End-of-Arm Tools
Automation zu Ende gedacht - Automatisierung ohne große Investition
Sie haben eine Bestandmaschine? Manuelle Schraubstöcke oder Spannsysteme? Eine Maschine ohne Anschlüsse für pneumatische oder hydraulische Leitungen? Der CLAMPBOOSTER kann das alles. Als EOAT entwickelt erspart er eine komplizierte kostenintensive Umrüstung des Bearbeitungszentrums.
Keine Bindung an hochkomplexe Systeme bei maximaler Effizienz!
Industrieroboter oder Cobot? Verschiedene Schraubstockhersteller, kraftverstärkte Systeme? Einsatz mehrerer Schraubstöcke in einer Maschine? Kein Problem für den CLAMPBOOSTER. Durch auswechselbares Zubehör ist er mit fast allen am Markt erhältlichen Systemen kompatibel.
Exakte Präzision und intuitive Bedienung
1,95 kg? 10 x 10 cm? Ja, das Drehmoment von bis zu 100 Nm, das der CLAMPBOOSTER aufbringen kann, ist enorm. Er arbeitet ohne Belastung auf den Roboter, Ansatzbolzen im Schraubstock eliminieren Torsionskräfte. Der Öffnungsweg des Schraubstocks ist durch Programmierung der Spindelumdrehungen per Software-basiertem Bedienverfahren exakt vorzugeben.
Komponenten des CLAMPBOOSTERs

Drive
für Cobots

Drive
für Industrieroboter

Central Unit

Control Box
Übersicht möglicher Zubehör-Adapter

Spin-Socket

Docking Plate
1,95 kg? 10 x 10 cm?
Ja, das Drehmoment, das der CLAMPBOOSTER aufbringen kann, ist enorm. Er arbeitet ohne Belastung auf den Roboter, Ansatzbolzen im Schraubstock eliminieren evtl. Torsionskräfte.